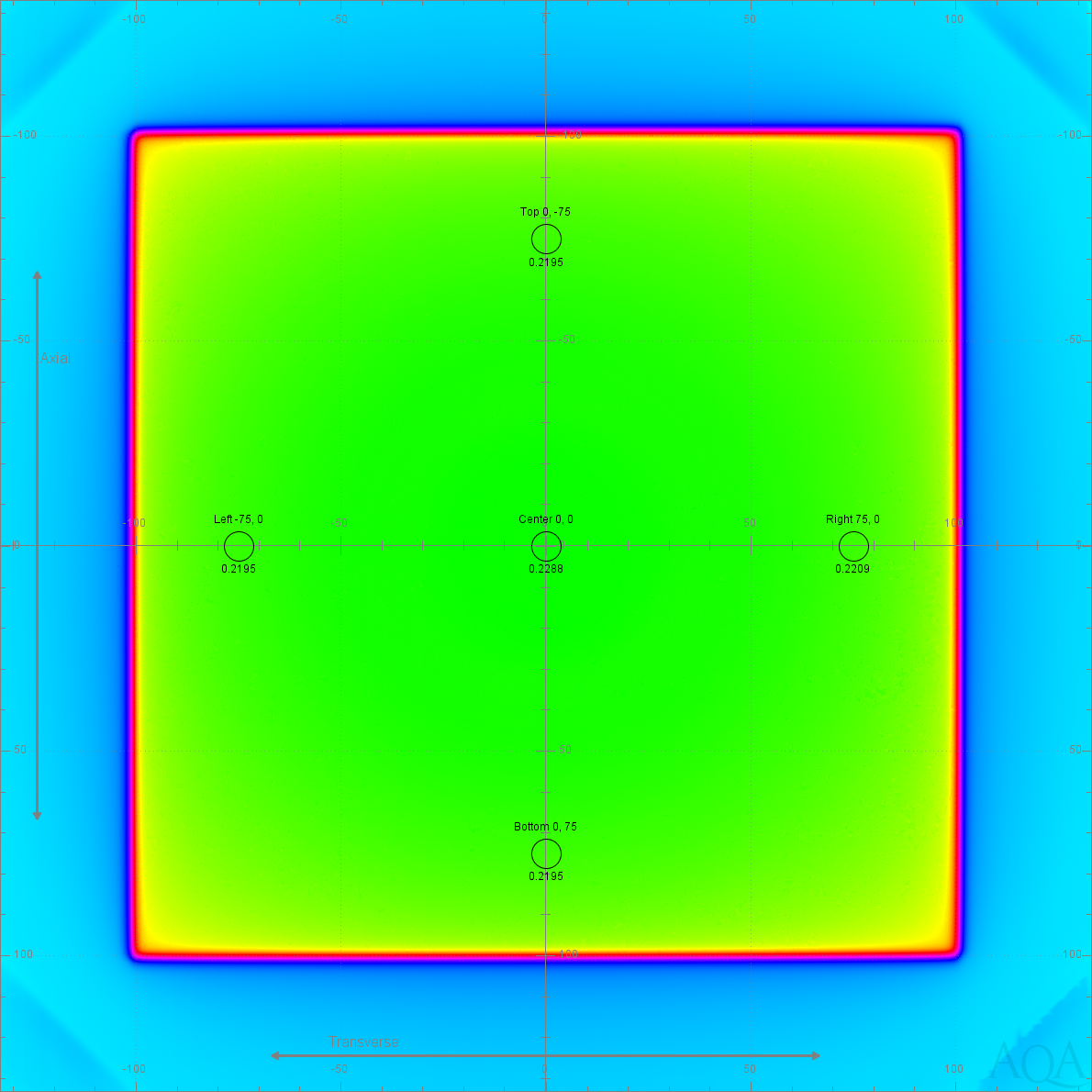
Each circle is 5 mm in diameter. They are 75 mm from the center of the image, with a compensation for collimator centering.
For the examples, the following values are used:| Source | Top CU | Bottom CU | Left CU | Right CU | Center CU |
|---|---|---|---|---|---|
| Analysis | 0.2195 | 0.2195 | 0.2195 | 0.2209 | 0.2288 |
| Baseline | 0.2206 | 0.2209 | 0.2220 | 0.2210 | 0.2301 |
Note on baseline values: Some tests are better evaluated when they can be compared to previous values. For these tests, AQA allows users to establish baseline values. When a test is run, the results are compared to the baseline values. The first time a test is run there are no baseline values, so the platform uses the results of the current test to establish them.
Users may override this default by using the "Use As Baseline" button, which will establish a new baseline going forward.:w
axial = ((top - bottom) / bottom) * 100
transverse = ((right - left ) / left ) * 100As an example, using the the above diagram:
axial = ((0.2195 - 0.2195) / 0.2195) * 100 = 0.0
transverse = ((0.2209 - 0.2195) / 0.2195) * 100 = 0.6378
(max - min) / (max + min) * 100As an example, using the the above diagram:
flatness = ((0.2288 - 0.2195) / (0.2288 + 0.2195)) * 100 = 2.0745
t = (top / center) - (baseline top / baseline center)
b = (bottom / center) - (baseline bottom / baseline center)
l = (left / center) - (baseline left / baseline center)
r = (right / center) - (baseline right / baseline center)The sum of these is taken, multiplied by 100 and averaged:
((t + r + b + l) * 100) / 4An example, using the the above values:
t = (0.2195 / 0.2288) - (0.2206 / 0.2301) = 0.0006395
b = (0.2195 / 0.2288) - (0.2209 / 0.2301) = -0.0006642
l = (0.2195 / 0.2288) - (0.2220 / 0.2301) = -0.0054450
r = (0.2209 / 0.2288) - (0.2210 / 0.2301) = 0.0050200
((0.0006395 + -0.0006642 + -0.0054450 + 0.0050200) * 100) / 4 = -0.01124
The standard deviation is recorded for each of the five circles as a measurement of image noisiness. If this value is large it indicates a poorer image quality. To normalize noisiness for comparison between beams and machines, the value is displayed as the coefficient of variation, which is:
coefficient of variation = standard deviation / meanAn example, using the the above center value and a standard deviation of 0.0002643:
0.001155 = 0.0002643 / 0.2288